Introduction
This Rotary Encoder driver can be used in conjunction with an incremental hardware rotary encoder. A rotary encoder, also called a shaft encoder, is an electro-mechanical device that converts the angular position or motion of a shaft or axle to analog or digital output signals.
Driver Parameters
The Rotary Encoder has three parameters that need to be configured:
CLK Pin
This pin provides the clock line from the rotary encoder. Any pin is suitable.
DT Pin
This pin provides the data line from the rotary encoder. The signal occurs either before or after the clock signal determining the direction the rotary encoder is turned. Any pin is suitable.
BTN Pin
This is the pin that transfers the signal when the rotary encoder is pushed on top. Any pin is suitable.
Wiring
Example
The GP0, GP1 and GP2 pins of the Builder Base are connected to the Clock, Data and Switch pin of the rotary encoder. The GND and V+ pins of the rotary encoder are then connected to the GND and 3.3V ports on the Builder Base respectively.
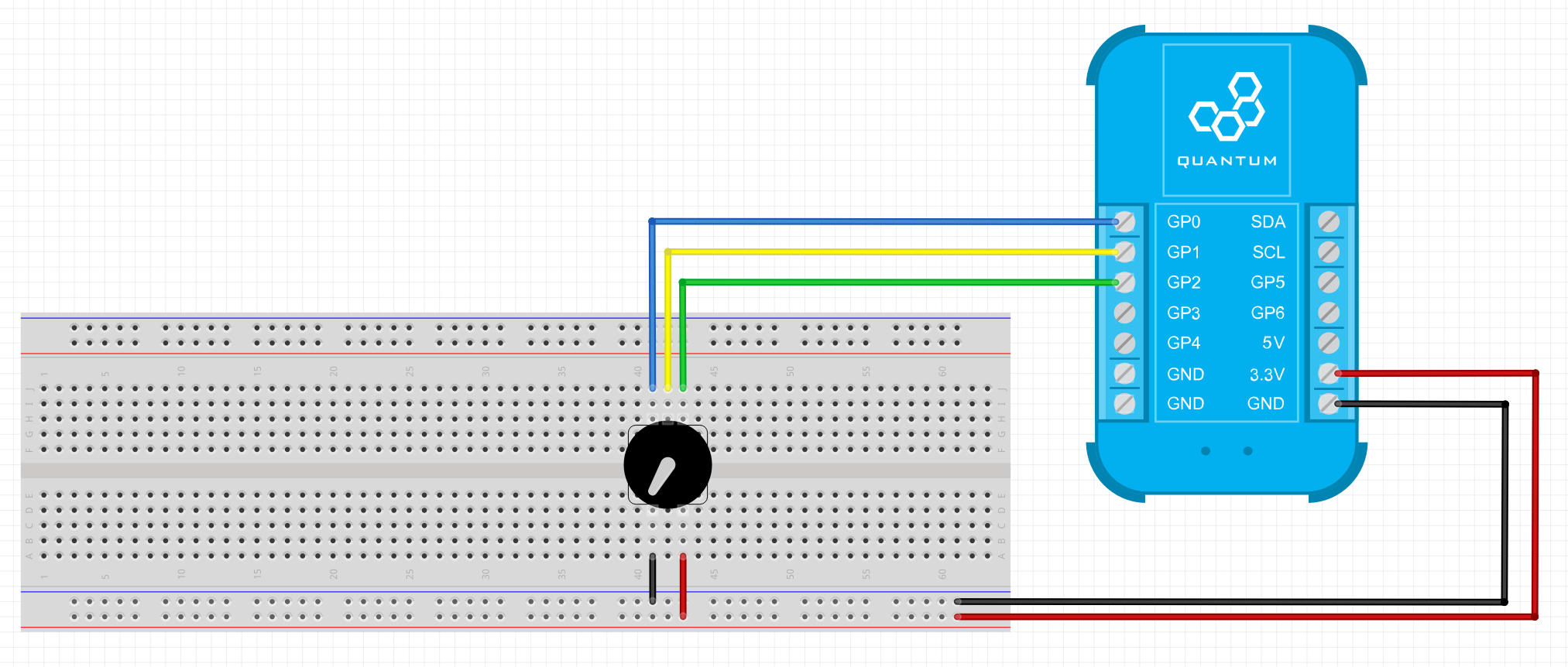
Breadboard
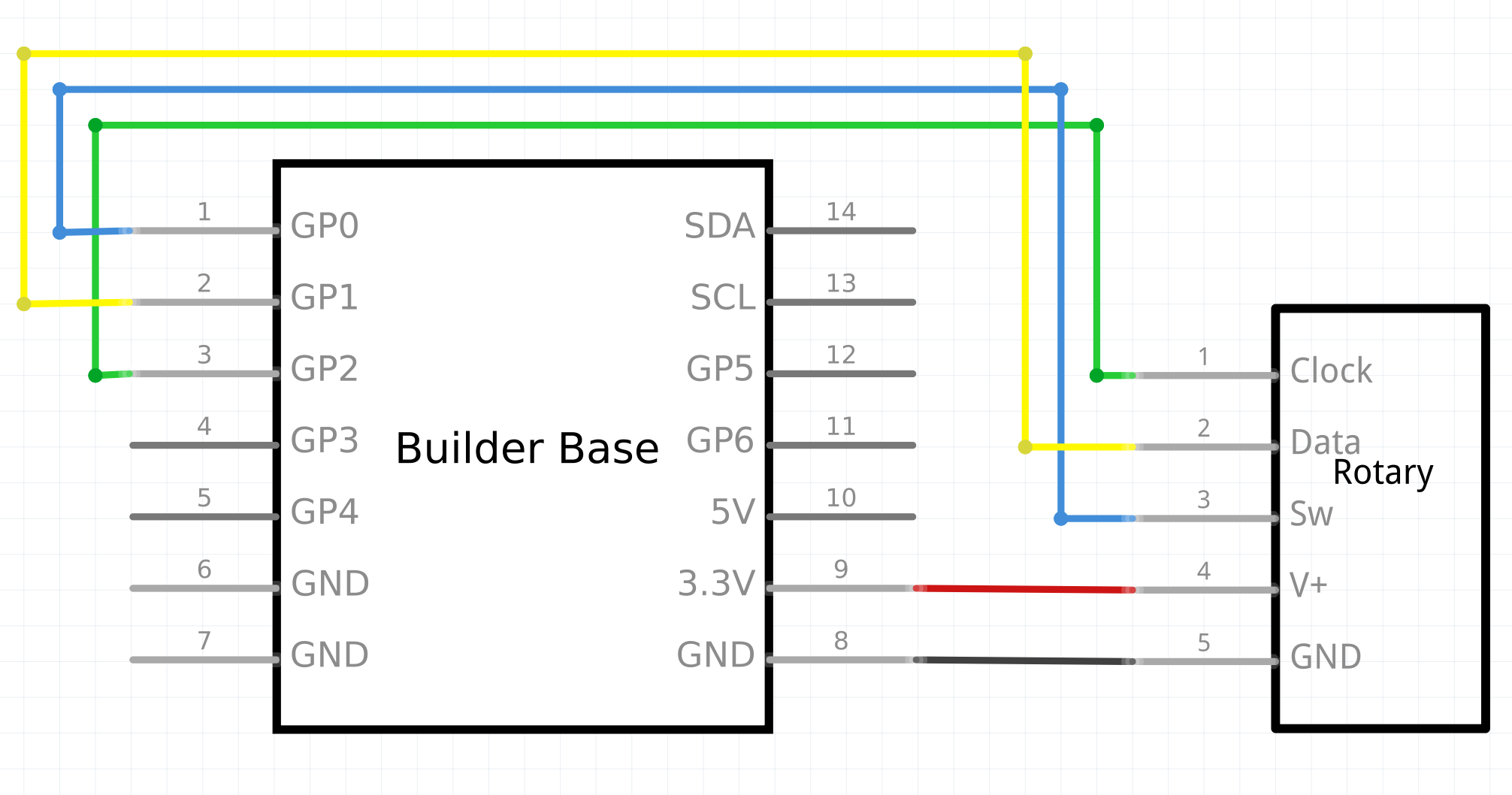
Schematic
Used Pins
Used Pins | Description |
|---|---|
GP0 (Can be any GP pin) | The clock line |
GP1 (Can be any GP pin) | The data line |
GP2 (Can be any GP pin) | The switch line |
3.3V | This pin provides the power |
GND | This pin provides the GND |